
I did the Rolling Shutter correction along with using the suggested Adaptive Camera Model per Agisoft's guidance and did not find it to have changed the outcome in any meaningful way worth reporting back to everyone other than to say I tried it and it did drastically change the outcomes.Thank you for your suggestions. Do you usually use rolling shutter correction with full Txyz and Rxyz parameters when processing data from the Matrice 4T ?
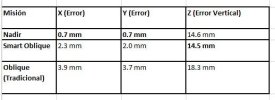
I am happy with my processing decisions in Agisfot because I ran the data in both Pix4D and Drone Deploy. Both of these solutions have much less user input, so there are less ways to interfere. With both as we saw in the reported RMSE sheet, Pix4D and Drone Deploy were for the most part very similar in results.
Now to find a day to do the final tests. PPK and I will try to use a Local Base for the best possible outcomes.
My poor M4E also needs to get some flight time. I have been flying the 4T nonstop since I got it. The thermal sensor and IR Cut Filter make night flying a blast.